Kazuyoshi Hiraiwa, President, FINEMECH
Shinji Morihiro, Representative, M Powerlabo
Background of the proposal
In recent years, the problem of BEV has become apparent, and the value of HEVs has been reevaluated. Under these circumstances, we would like to propose a next-generation HEV system.
Purpose of the proposal
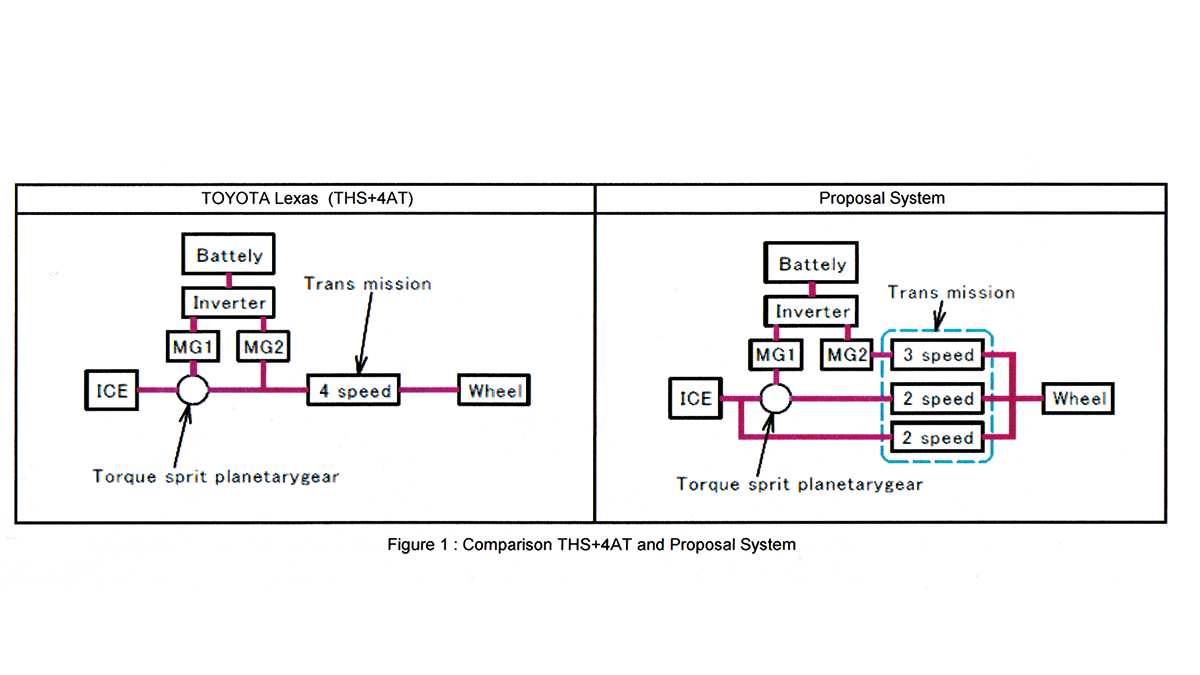
This proposal is based on the THS (Toyota Hybrid System). This is because the THS is superior to the series model in terms of power transmission efficiency as an E-CVT. The THS used in the Prius is simple system but it is generally said to have problems with starting acceleration performance and high-speed fuel economy. Looking at the specifications of the Prius, in order to ensure starting acceleration performance, the capacity of the MG2 (Motor Generator 2) for driving in recent models is larger than that of the initial model. However, the increased capacity of the MG2 makes to a deterioration in high-speed fuel economy. On the other hand, Toyota has added a four-speed automatic transmission planetary gear mechanism to the THS for LEXUS to improve both fuel efficiency and acceleration performance. However, this can only be applied to FR cars due to the axle length.
This proposal aims to improve fuel efficiency and acceleration performance by applying a dog-clutch parallel-shaft transmission mechanism to the THS, while also realizing a configuration that can be installed in FF vehicles. (see Figure 1)
Proposal Overview
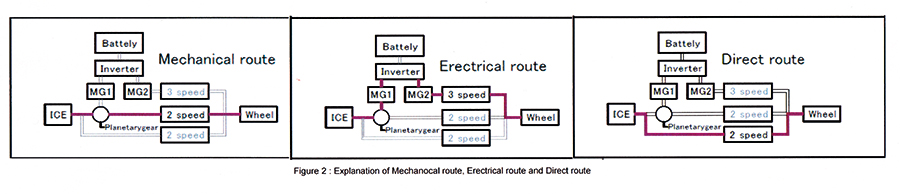
The power transmission route between the ring gear and the output shaft of the planetary gear for torque division is the „mechanical route“ (M route), and the route that transmits power from the sun gear to the output shaft via MG1 and MG2 is the „electric route (E route)”. If the route between the input shaft and the output shaft is a „direct connection route (D route)”, a dog clutch type transmission mechanism is provided for each route (see Fig. 2). That is, there are only three sleeves. Normally, both the M route and the E route are transmitted as an E-CVT, but when switching from H-1 to H-4, which will be described later, the gear is shifted through the D route to avoid loss of output shaft torque when driving on one route while driving on the other route, and when shifting under high load.

MG capacity (at ICE power 1) is assumed as follows: This takes into account that if the input shaft is fixed and used as a PHEV, the driving force equivalent to that of an ICE can be obtained. Also, the specs of the early PRIUS were almost this ratio.
MG1 0.4
MG2 0.6
Basic rule of Sleeve switching (Dog clutch)
Torque is set to 0 and the engagement is related, and the engagement is carried out with a speed difference of 50rpm or less.
Operation
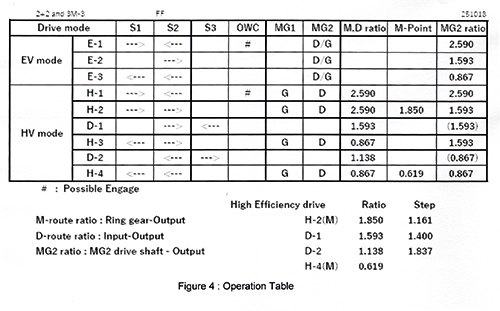
First, we will explain the shifting operation of the E-CVT in HV mode. If the sleeves are S1, S2, and S3, then the H-1 is a combination of the M route (S1) and the E route (S2) with Lm and Le. Switching from H-1 to H-2 is done as follows: When driving on Lm on the M route, the MG2 torque is reduced to zero at the mechanical point (when MG1 stops), making it easier to switch the E route from Le to Me, and the output torque can be shifted without change. That is, the switching from H-1 to H-2 is carried out with gear ratios near the mechanical point of H-1.
Also, switching between H-2 and H-3 is done through the D-route Ld (D-1). In other words, if the gear ratio is equal to the value of Ld while driving in H-2, the speed of the S3 and the opponent’s gear matches, so it is easy to shift S3 and switch to D-1 at this point. S1 and S2 can be freely operated while driving in D-1, so if you revive the power generation of MG1 and the drive of MG2 by connecting H-3 in the operation chart, it will switch to H-3. This can also be done without any change in output torque.
Similarly, it is easy to switch from H-2 to H-4 via D-3. You can switch in the same way in these reverse orders.
In addition, the above switching is done with a fixed gear ratio, but especially in low to medium load driving, it is possible to switch without the drive of the D-route in any gear ratio. This means that you can drive on one route, M route and E route, while switching between the other. In this way, in low- to mediumload driving, it is possible to switch between any gear ratio without little change in output torque.
Kickdown
If you press the throttle pedal sharply while cruising on the H-3, follow these steps:
When the ICE power is increased and the gear ratio is equal to the value of D-1, switch S3 to Ld (D-1) and operate S1 and S2 to switch to the desired drive mode while driving with D-1.
If you press the throttle pedal sharply while cruising on the H-4, follow these steps:
When the ICE power is increased and the gear ratio is equal to the value of D-2, switch the S3 to Hd (D-2), and operate the S1 and S2 to switch to the desired drive mode while driving with D-2.
Of course, if the amount of throttle pedal depression is not very large, you can switch at any gear ratio by switching while driving on either the M route or the E route mentioned above.
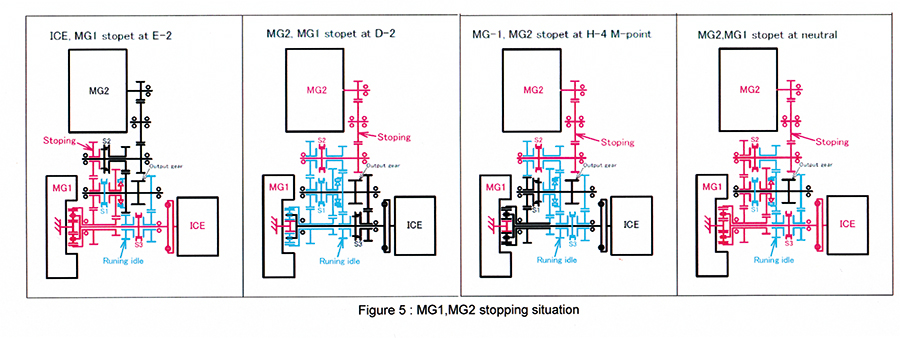
MG1 & MG2 Stops
It is widely known that power loss due to dragging torque of MG1 and MG2 occurs when the ICE stops at medium or high speeds, or when MG2 is driven at low load at high speeds. The system allows MG1 and MG2 to be stopped as needed. (See Figure 5)
This means that if the ICE stops while driving at medium to high speeds, you can stop MG1 by putting S1 in neutral. If you want to revive the connection of MG1, rotate MG1 to synchronize and shift S1 again. In addition, the gear ratio near the mechanical point of the H-4 and the low-load high-speed driving on the D-1 and D-2 can keep the MG2 at a standstill if the S2 is neutral. This avoids loss of drag torque and improves fuel economy.
Application to PHEV
As is well known, PHEV is established by increasing the battery capacity and providing a means to fix the input axis, allowing MG1 to participate in driving in addition to MG2 in EV mode. In this case, by driving one of the M routes and the E route while switching between the other using the same method as above, you can switch between EV mode while preventing loss of output torque. This means that it is possible to smoothly switch between the MG2’s three-stage drive and the MG1’s two-stage drive without losing drive torque. Of course, this is when switching, not to mention that after the switch is complete, you can drive both MG2 and MG1, or even one of them. It can also be driven by stopping one side, allowing for a variety of drives.
Advantages of this system
- The multi-stage THS reduces the capacity of the MG2 while ensuring acceleration performance in the low speed range and driving torque during reverse driving.
- In HV mode, the drive mode can be switched without changing the output torque. Moreover, in medium and low load driving, it can be switched with any gear ratio.
- No oil pump or friction clutch required.
- MG2 and MG1 can be stopped when it is not needed.
- By reducing the size and stopping of the MG2, fuel efficiency can be improved by about 6 ~ 8 % during high-speed cruising.
- When applied to a PHEV, it makes EV mode driving in multiple modes to achieve smooth shifting.
- While having the above functions, it fits into a size that can be installed on an FF car.
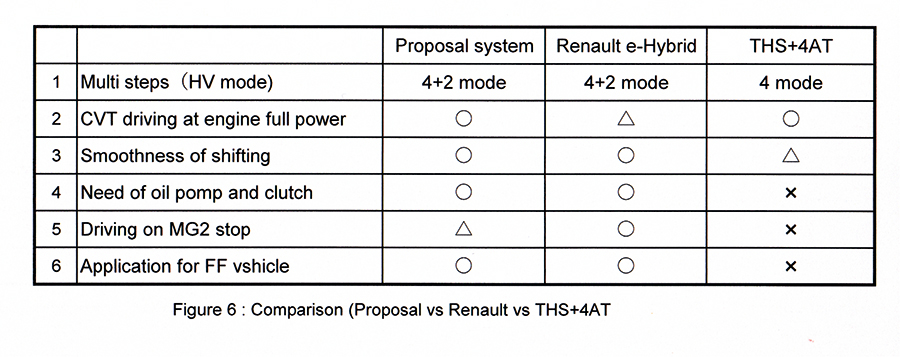
When compared to the THS+4AT and Renault systems, we can see that this system has many advantages. (See Figure 6).
References
- TOYOTA Hybrid System, Development of Multi Stage Hybrid Transmission , K. Okuda, Y. Yasuda, M. Adachi, A. Tabata, H., Suzuki, K. Takagi(Toyota), T. Atarashi, R. Horie (Aisin AW), 2017 SAE World Congress, No.2017-01-1156 (2017/4/4-6)
- Renault HEV System, The new DHT from Alliance Renault/Nissan, Antoine Vignon (Renault FRANCE), CTI Symposium 2017 Berlin